Python
It is based on the python invented
by Jürgen Mages, a center-steered low racer.
I wrote a program to try to see if it
could be self-stable. It isn't. It is written in the computer language
Python.
Links:
Jürgen Mages page
The discussion list
Dirk Bonne - 20" low python
Jürgen's list of python links:
http://www.python-lowracer.de/links.html
 Electrified. 250W motor ~ 25km/h flat cruise.
Electrified. 250W motor ~ 25km/h flat cruise.
From wildernessenergy.com
 On the Mission Beach boardwalk
On the Mission Beach boardwalk
 under construction
under construction
 close-up
of the pivot
close-up
of the pivot
 after
first test ride (note the handlebars - now removed)
after
first test ride (note the handlebars - now removed)
 more
practice
more
practice
 even
more practice
even
more practice
 measuring the change needed
measuring the change needed
 frame cut to new size
frame cut to new size
 rear view mis-alignment after tack weld
rear view mis-alignment after tack weld
 finished, new geometry!
finished, new geometry!
109cm wheelbase
40cm seat ht
47.5 BB ht
28.5cm trail
 functionally complete
functionally complete
 close-up of the BB and tube joints
close-up of the BB and tube joints
 close-up of the pivot and brake mounting
close-up of the pivot and brake mounting
My experiences and recommendations for to others starting out:
(much of this is an echo of other's postings on the mail list)
http://www.freelists.org/archives/python/
- Have the seat as high as you can while able to touch ground, I actually
found that I didn't start with my hands down, but it is helpful many times
- Do not use a low pivot angle, at least at first. The biggest thing against
me was the slow response of steer. When I had a 59deg. angle and lower seat
I
could _not_ learn to ride it. It seems acceptable at ~65 now.
- Wear gloves. No need for a helmet, your hands, elbows and knees will always
hit first.
- Find a wide space. I crashed and stopped pointlessly, and often, in the
street. I even considered training wheels <gasp>. But, I moved to a
set of
tennis courts nearby and was riding around them in 10 minutes.
- I think my solid, stiff seat helps as it gives something stable to push
against with the back to pedal and maneuver.
- I use the under-seat handlebars I just welded on, a lot, - but many don't
and Jurgen apparently has control issues with them. I try to learn legs-only
as
I can. (You know, I gives me the impression of riding my Trek no-hands while
standing up with the top tube between my legs, Tricky, but do-able.) I removed
the high bars in the one photo; although the motion is less contrary to the
hip
motion. With the low bars I definitely feel pushing on the right hinders my
hips swinging right when turning left.
- Starting took me more practice than maneuvering once going.
I start by holding the brake, both hands on the bars, setting one pedal towards
me and one good push to start. I need to get up 8+km/h to feel steady. The
most
important thing is starting very nearly upright and straight. A few quick
adjustments until you get up more speed might be all you need. Again, because
of the pivot angle I sometimes find the need to swing the wheel wildly if
I
don't start well; this is where the bars help I think, as the feet are not
yet
cycling quickly and the need to get the bike back under me quickly is large.
Going downhill I keep the rear (the only) brake dragging, it feels more stable
and prevents disasters.
I have the chain set on the middle 36 ring and the middle 22 cog. I'll add
shifters next week. A lower gear helps a lot too, it gets the feet moving
around quicker. I find the same riding upright no-hands; it's easier to do
while pedaling.
- I look ahead about 10 meters; anything closer, it's too late anyway...
I can just turn around (usually) in one-half of a tennis court. Staying upright
with the CoG over the wheelbase is many times more finicky than
my Trek.
The pencil vs. broomstick balancing
analogy is apt, and looking ahead vs. at the front wheel really make a
difference at this point.
 Electrified. 250W motor ~ 25km/h flat cruise.
Electrified. 250W motor ~ 25km/h flat cruise. On the Mission Beach boardwalk
On the Mission Beach boardwalk under construction
under construction close-up
of the pivot
close-up
of the pivot after
first test ride (note the handlebars - now removed)
after
first test ride (note the handlebars - now removed) more
practice
more
practice even
more practice
even
more practice measuring the change needed
measuring the change needed frame cut to new size
frame cut to new size rear view mis-alignment after tack weld
rear view mis-alignment after tack weld finished, new geometry!
finished, new geometry! functionally complete
functionally complete close-up of the BB and tube joints
close-up of the BB and tube joints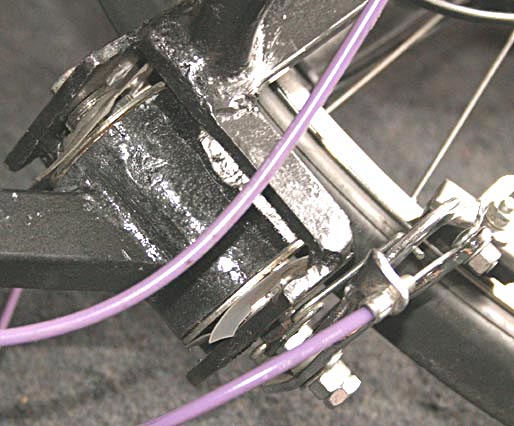 close-up of the pivot and brake mounting
close-up of the pivot and brake mounting{kind=link}